
ADVANCED ELECTRONIC CONTROLS.
In the implementation of electronic control applications state-of-the-art methodologies and tools are adopted in the automotive industry, followed by a structured development process based on model-based design and compliant with the so-called “V design and validation model” approach. “. The application is developed at different levels: system design, functional implementation and validation, definition of software implementation specifications, production software for integration on third party hardware and implementation of complete electronic control systems.
These applications concern the entire domain of on-board electronic control: from the engine control to the gearbox control, from the control of electric and electric hybrid propulsion to the different functions inherent to the vehicle dynamics. In the case of applications to operating machines, for example for earth-moving or lifting, to the above-mentioned contents, the perimeter extends to the control of the hydraulics and the actuation implements, while in the agricultural applications the electronic control of the equipment is included.
ELECTRIC AND HYBRID ELECTRIC PROPULSION.
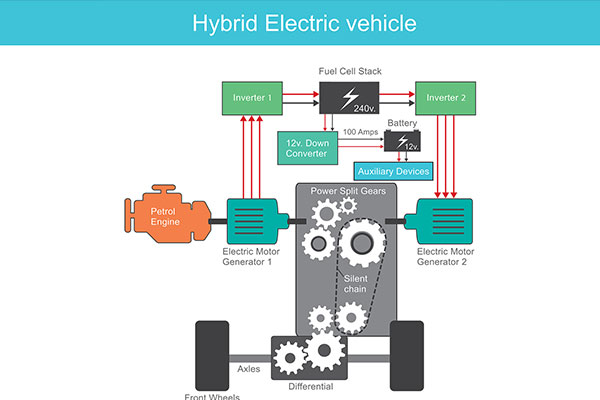
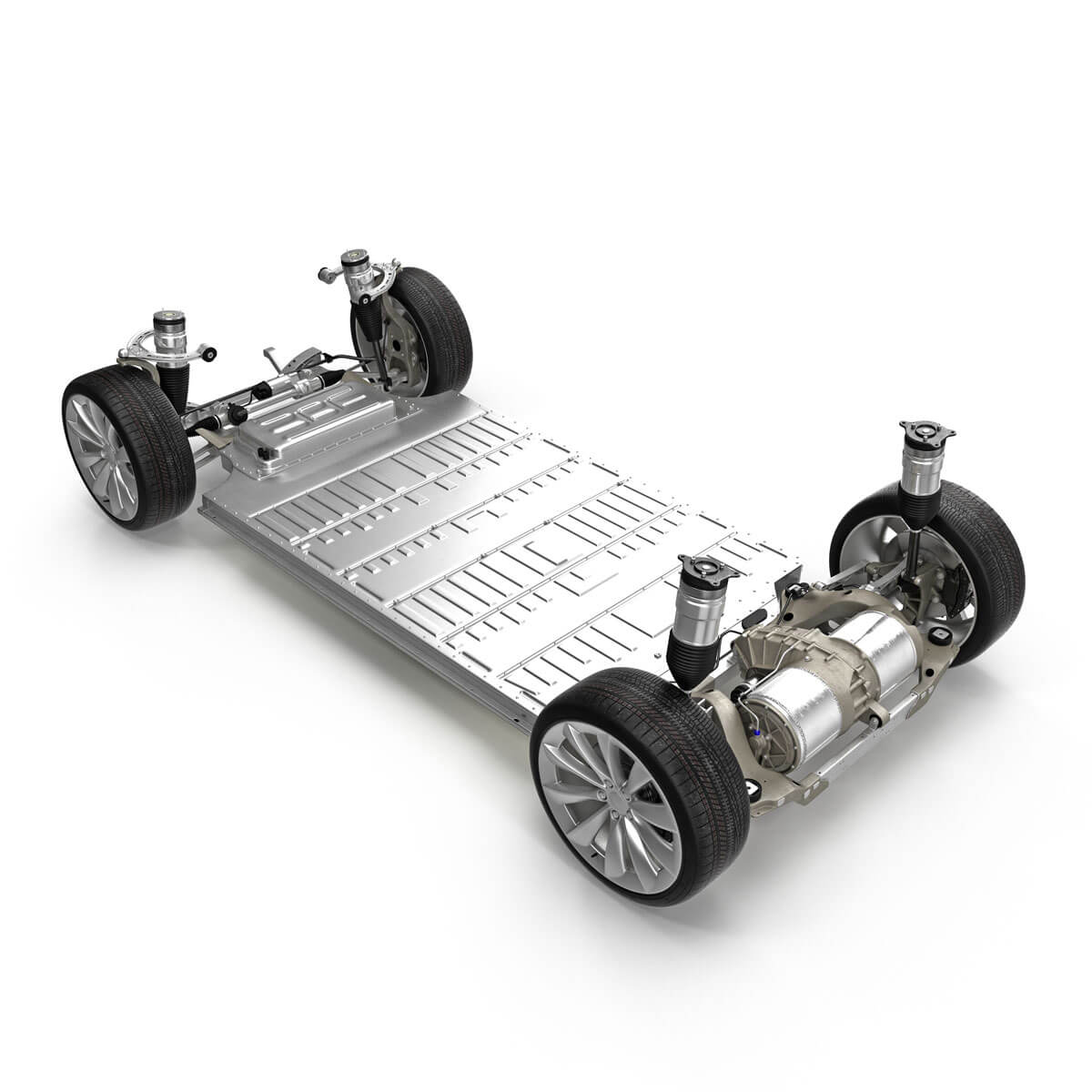
The system design of electric and hybrid electric propulsion is achieved by following a model-based systems engineering approach that allows to determine, for the required application, the best architecture, the most appropriate technology and the optimal dimensioning of the components. The design is supported by the use of a proprietary design tool that incorporates the solid experience gained in the industry. The realization of concept vehicles is effectively dealt with by integrating on the vehicle the electronic control VMS (Vehicle Management System) of property that is distinguished by: wide configurability for P0, P1, P4, series, power-split; wealth of functions for energy optimization, close integration with the engine control and vehicle dynamics functions. The VMS control software is further elaborated and refined for the specific application and integrated into an electronic control unit for production. Both the system design and the VMS control are designed to cover diversified application domains: from cars to commercial vehicles, from operating machines to nautical applications.

ROBOTICS AND AUTONOMOUS VEHICLES.
The development of robotic systems and autonomous vehicles is conducted by applying the advanced methodologies of the automotive industry with particular reference to the system design and to the design and implementation of the electronic control system. The robotic realizations incorporate the innovative thrust represented by Industry 4.0 and are oriented towards the realization of the smart factory. But the robotic technologies and the principles of the fourth industrial revolution cross the boundaries of industrial production contexts and are applied in the agricultural sector, Agriculture 4.0, as in the construction sector, Construction 4.0. The mobile and collaborative robotics, geolocation, artificial vision, advanced sensors and artificial intelligence algorithms are applied in the realization of electronic control systems for agricultural vehicles for precision agriculture and for the design and production of guided vehicles. autonomous, equipped with implements for the automatic execution of working tasks. The use of robotic technologies in the agricultural sector and operating machines involves the integration of perception devices and processing algorithms capable of assessing in real time the evolution and quality of processing and synthesising the information necessary for the control of working implements.